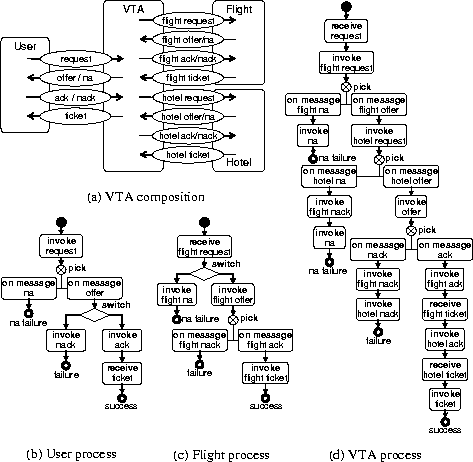
Figure 1: Composition participants
Web services provide the basis for the development and execution of business processes that are distributed over the network and available via standard interfaces and protocols [8]. Service composition [12] is one of the most promising ideas underlying Web services: new functionalities can be defined and implemented by combining and interacting with pre-existing services. Different standards and languages have been proposed to develop Web service compositions. Business Process Execution Language for Web Services (BPEL, [2]) is one of the emerging standards for describing a key aspect for the Web service composition: the behavior of the service. It provides a core of process description concepts needed for the definition of interactions among distributed processes. This core of concepts is used both for defining the internal business processes of a participant to an interaction and for describing and publishing the external business protocol that defines the interaction behavior of a participant without revealing its internal behavior.
BPEL opens up the possibility of applying a range of formal techniques to the verification of the behavior of Web services, and different approaches have been defined for verifying BPEL [6,13,14,15,7,17]. We are interested in particular in those techniques that are applied to the verification of BPEL compositions: in this case, we have to verify the behaviors generated by the interactions of a set of BPEL processes, each specifying the behavior of one of the services participating to the composition.
A key aspect for this kind of verification is the model adopted for representing the communications among the Web services. Indeed, the actual mechanism implemented in the existing BPEL execution engines is both very complex and implementation dependent. More precisely, BPEL processes exchange messages in an asynchronous way; incoming messages go through different layers of software, and hence through multiple queues, before they are actually consumed in the BPEL activity; and overpasses are possible among the exchanged messages.
However, most of the approaches proposed for a formal verification of BPEL compositions exploit a synchronous model of communications, which does not require message queues and hence allows for a better performance in verification. This synchronous mechanism relies on some strong hypotheses on the interactions allowed in the composition: at a given moment in time, only one of the components can emit a message, and the receiver of that message is ready to accept it (see e.g., [7]).
In our experience, these hypotheses are not satisfied by many Web service composition scenarios of practical relevance, where critical runs can happen among messages emitted by different Web services. This is the case, for instance, when a Web service can receive inputs concurrently from two different sources, or when a service which is executing a time consuming task can receive a cancellation message before the task is completed.
Our goal is to provide extended composition mechanisms, where the hypotheses on synchronous communications are weakened, but the communication model is kept as simple as possible. This way, an accurate modeling is possible for a wider class of service composition scenarios, while an efficient performance is still achievable in verification.
In this paper, we propose a model of composition, which is based on a parametric definition of the communication infrastructures. More precisely, it is possible to define different communication models by changing the number of queues existing among the component processes and the sets of messages associated with the various queues. By increasing the number of queues, and hence by allowing more and more asynchrony in the evolution of the system, we define a hierarchy of communication models that are able to model larger and larger composition scenarios. The most restrictive model, with only one shared queue of capacity 1, is shown to be equivalent to the synchronous model of [7]. The most liberal model, instead, which has dedicated queues for each type of message, can describe virtually all the examples of BPEL compositions we found in the literature and in practical usage.
The paper also describes an algorithm for the verification of BPEL compositions. The algorithm is able to identify the simplest communication model in the hierarchy that is adequate for a specific set of BPEL processes. It then builds the corresponding composition, that can be emitted in the input languages of two state of the art model checkers, namely NUSMV [4] and SPIN [9]. These model checkers can then be used to verify properties of the compositions expressed in standard specification languages such as Linear-time Temporal Logic (LTL). We conducted some experiments on our system in order to evaluate the applicability and scalability of the approach. These experiments show that the performance of the verification decreases when the complexity of the communication model increases, and that the possibility to select automatically the right model is very useful to improve the verification performance.
The paper is structured as follows. In Sect. 2 we introduce several instances of the case study that motivate the necessity to consider different variants of communication mechanism. Section 3 defines the parametric model for Web service compositions. Section 4 investigates a hierarchy of this models and addresses the problem of identifying the most adequate model for a specific composition scenario and Sect. 5 presents the algorithm for identifying and building such most adequate model. An experimental evaluation of the approach is presented in Sect. 6, while conclusions and future work are presented in Sect. 7.
In order to illustrate the problem of modeling service compositions, we consider several variants of the Virtual Travel Agency domain. The goal of the Virtual Travel Agency is to provide a combined flight and hotel booking service by integrating two independent existing services: a Flight booking service, and a Hotel booking service. Thus, the composition describes the interactions of four partners: User, Virtual Travel Agency (VTA), Hotel and Flight services (see Fig. 1.a).
In our framework, we model the composition using BPEL specifications that describe the workflows and the interactions of the four partners. BPEL provides an operational description of the (stateful) behavior of web services on top of the service interfaces defined in their WSDL specifications. An abstract BPEL description identifies the partners of a service, its internal variables, and the operations that are triggered upon the invocation of the service by some of the partners. Operations include assigning variables, invoking other services and receiving responses, forking parallel threads of execution, and non-deterministically picking one amongst different courses of actions. Standard imperative constructs such as if-then-else, case choices, and loops, are also supported.
In this paper, we will use diagrams like the ones in Fig. 1 for representing the BPEL specifications. The BPEL sources for the examples we describe in the paper are available at http:/www.astroproject.org/.
In this scenario, the user can ask the VTA to book a flight to a specified location and reserve a room in a hotel at that location for a given period of time. It is possible that the request of the user cannot be fulfilled, in which case the user receives a not-available (na) notification from the VTA. If a reservation offer is received instead, the user can accept or reject it, sending a corresponding message to the VTA service (Fig. 1.b).
The Flight booking service becomes active upon a request for a given location (e.g., Paris) and a given period of time (e.g., August). In the case the booking is not possible, this is signaled to the requestor, and the protocol terminates. Otherwise, the requestor is notified with an offer information and the protocol stops waiting for either a positive or negative acknowledgment. In case of positive answer, the flight is successfully booked and the reservation ticket is sent, otherwise the interaction terminates with failure. Figure 1.c represents the protocol provided by the Flight booking service. The protocol of the Hotel service is similar.
The behavior of the VTA is as follows. After receiving a reservation request from the user, the VTA interacts with Flight and Hotel services to obtain ticket offers and expects either a negative answer if this is not possible (in which case the user is notified and the protocol terminates with failure), or provides the user with an offer indicating hotel, flights and cost of the trip. After that, the user may either accept or refuse the offer, and in the first case VTA provides the user with the tickets obtained from Hotel and Flight. The diagram corresponding to the BPEL protocol of VTA is represented in Fig. 1.d.
This composition scenario exhibits an important property that allows for a very simple communication mechanism. At any moment of time, only one of the partners is ready to emit a message. Moreover, the corresponding receiver is ready to accept the message. Using the terminology of [7], the composition model satisfies the synchronous compatibility, autonomy and lossless composition properties. As a consequence, a synchronous communication model can be used to define the composition without loosing completeness of behaviors. As demonstrated in [7], this allows for an efficient verification of the composition scenarios.
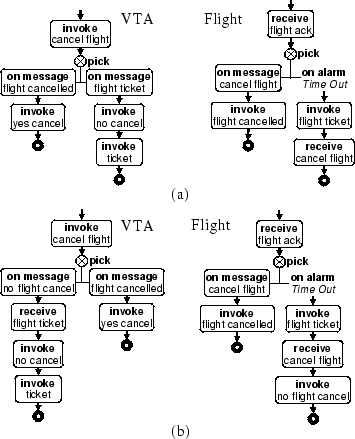
Unfortunately, the simplified communication model of the previous example is not applicable to all kinds of interactions. A typical example is a business process with event handlers. Let us consider an extension of the ticket reservation scenario, such that the user can decide to cancel the booking operation. In this case the user can send a cancel message to the VTA and wait for the outcome of the cancellation. The VTA forwards the cancellation to the Flight (and similarly to the Hotel process, we omit this for the sake of simplicity). The Flight waits for a cancellation message for a certain time after the acknowledgement of the reservation. If the cancellation message is received on time, the Flight notifies a successful cancellation. If the time for a cancellation runs out, the Flight sends a ticket to the VTA, thus forcing the failure of cancellation: cancellations sent by the VTA after the ticket is sent are consumed and ignored. The excerpts of the corresponding process specifications are represented in Fig. 2.a.
The verification under the synchronous communication model is not able to manage correctly this example, and reports a deadlock. Indeed, if the Flight service fails to wait for a cancellation, the onAlarm activity is fired and a ticket is sent to the VTA process. Meanwhile, the VTA may receive a cancellation message from User and forward it to the Flight service. Therefore both Flight and VTA would try to send messages to each other and the composition would be in a deadlock according to the synchronous semantics.
This deadlock is not real, in the sense it does not occur in existing BPEL engines; since the Web services communications are asynchronous, and the message emission is not blocking, both processes will emit messages to each other. Both messages will be consumed then and the composition terminates correctly.
The problem we are facing here is that the synchronous model is too restrictive. The message delivery and processing may require a certain time, thus leading to situations where concurrent message emissions take place. These situations, however, are not allowed in the synchronous communication model. In order to verify correctly the considered example, a relaxed model is needed that allows considering these concurrent message emissions.
If one applies the verification approach of [7] for the analysis of such a composition, then the inapplicability of the synchronous communication model is detected and reported. However, [7] and other verification approaches fail to find an alternative communication model that is adequate to the scenario. In [7], an arbitrary communication model with 2-position buffers is applied, which is rather expensive from the verification point of view, and still does not guarantee the correctness of the verification.
Let us consider a further modification of the case study. In this case, after the VTA has sent a cancellation message to the Flight, it waits for a message notifying whether the cancellation is possible (message flight cancelled) or not (message no flight cancel). In the latter case, it waits for the ticket and sends is to the user. The Flight service, on the other side, behaves as before with the only difference that, after emitting the ticket and receiving the cancellation, it sends a notification about cancellation rejection (message no flight cancel). The corresponding diagrams are represented in Fig. 2.b.
Even if one verifies the example allowing for concurrent message emissions, the following incorrect scenario may occur. The Flight service sends a ticket and waits for a cancellation. At the same time, the VTA process sends a cancellation request that the Flight service rejects. The VTA has received a ticket and then a cancellation rejection, but it is not able to process the messages in this order. Only if the execution of processes in the run-time environment allows for reordering of messages (which is the case for existing implementations) the deadlock disappears, since the cancellation rejection can be processed before the ticket message.
This example shows a necessity not only to consider systems which do not follow the synchronous communication semantics, but also to accept less restrictive models where message reordering is allowed. If this is not done, then scenarios that can occur in practice are not considered in the verification, and wrong results can be obtained.
This chain can be further prolonged, leading to more complex communication models. One can think of lossy channels, complex ordering conditions, complex queue models etc. As a result, the behavior of the given composition varies when different models are applied. In the following we present a parametric communication model that is suitable for the description of wide class of composition scenarios, including those discussed in Example 1,2,3. This model, however, relies on certain hypotheses on the Web service compositions. These hypotheses define some boundaries to the scope of our verification framework, and will allow us to abstract from low-level issues that are irrelevant for the "logic" of the composition, and to simplify the formalization of the model:
Under these assumptions, we consider a very general communication infrastructure that allows for modeling the following features:
We remark that the most critical requirement is the last one. Indeed, existing BPEL engines manage queues in a specific way, and some of the behaviors that are possible with the arbitrary queues could not be possible in the concrete implementation of queues of a specific engine. Assuming the most general behavior of queues allows us to guarantee that the theoretical model includes all behaviors that are possible in every specific engine. We will see that, for certain classes of systems, it is possible to identify some properties of the engine that guarantee that all behaviors allowed by the theoretical model can occur in the concrete implementation.
We now present the formal model we propose for representing and analyzing Web service compositions. We provide a formal representation of stand-alone Web services and generic Web service compositions. We also define the behavior of the composition used as a basis for the composition verification.
In our framework, we encode BPEL processes as state
transition systems which describe dynamic systems that can be
in one of their possible states (some of which are marked
as initial states) and can evolve to new states as a
result of performing some actions. We model process
interactions as external actions defined on a set of
operations (or message types)  . Following the standard approach in process
algebras, external actions are distinguished in input
actions, which represent the reception of message of type
. Following the standard approach in process
algebras, external actions are distinguished in input
actions, which represent the reception of message of type
 , denoted as
, denoted as
 , and output actions,
which represent messages of type sent to external services, denoted as
, and output actions,
which represent messages of type sent to external services, denoted as
 . We also define a special
action
. We also define a special
action  , called internal
action, which is used to represent evolutions of the system
that do note involve interactions with the external services. A
transition relation describes how the state can evolve on
the basis of inputs, outputs, or of the internal action .
, called internal
action, which is used to represent evolutions of the system
that do note involve interactions with the external services. A
transition relation describes how the state can evolve on
the basis of inputs, outputs, or of the internal action .

The assumption on the finiteness of the states set is required in order to enable the analysis techniques presented in this work. For the sake of space, we omit the discussion on the formal translation from BPEL to STS. This translation is implemented inside our toolkit, which is available from http:/www.astroproject.org/.
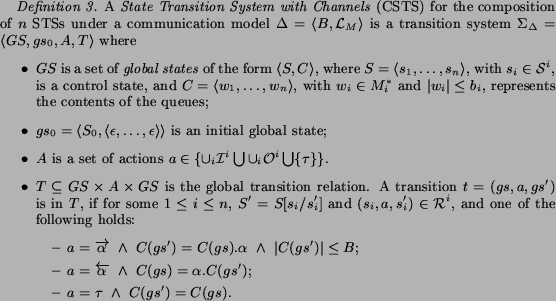
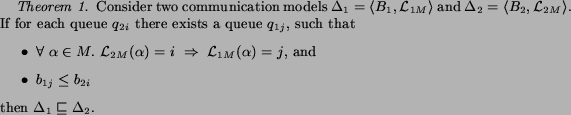
In order to represent a composition of Web services, we now define state transition systems with channels. This model describes the executions of the composition according to a parametric definition of the communication model.
Intuitively, this model is characterized by a set of global states, describing the composition during its execution, and a set of (FIFO) queues that store the messages exchanges among partners1. A global state contains two components: a control state that represents the local states of the participating STSs, and a queue content that defines sets of messages stored in the queues in a particular moment of time.
More precisely, let us assume that the composition is built
from  STSs
STSs  representing the participating
Web services. We represent a control state as a vector
representing the participating
Web services. We represent a control state as a vector  , where
, where  is a local state of the
is a local state of the
 STS. We denote a vector with
component
updated to
STS. We denote a vector with
component
updated to  as
as
 . Let us also
assume to model the communications among Web services with set of
. Let us also
assume to model the communications among Web services with set of
 queues with disjoint
alphabets
queues with disjoint
alphabets  ,
,
 . A queue
. A queue
 may be
declared as bounded, with the corresponding capacity
may be
declared as bounded, with the corresponding capacity
 , or
unbounded, in which case
, or
unbounded, in which case  . As one can see, given the same set of STSs,
different configurations may be used to represent their
composition. These configurations are parametric with respect to
the number of queues, to the distribution of the queue alphabets,
and to the queue bounds. We denote such configurations as
communication models.
. As one can see, given the same set of STSs,
different configurations may be used to represent their
composition. These configurations are parametric with respect to
the number of queues, to the distribution of the queue alphabets,
and to the queue bounds. We denote such configurations as
communication models.

We define a queue content as a vector  , where
, where  represents a sequence of
messages stored in the
represents a sequence of
messages stored in the  queue. An operator
queue. An operator  denotes the concatenation. That is,
denotes the concatenation. That is,
 , where
, where
 if
if  , and
, and  otherwise. We write
otherwise. We write
 to specify
that
to specify
that  .
.
The behavior of CSTS can be described with a directed
(possibly infinite) labeled tree, called reachability tree
 . Nodes in this tree are
labeled with (reachable) global states
. Nodes in this tree are
labeled with (reachable) global states  ; the root is labeled with the initial
global state
; the root is labeled with the initial
global state  ;
edges are labeled with actions
;
edges are labeled with actions  . The reachability graph
. The reachability graph  is obtained from
by merging nodes labeled
with identical global states.
is obtained from
by merging nodes labeled
with identical global states.
We say that the CSTS is complete if all the terminating
global states  (that is, leaves of the reachability tree) have empty queue
content:
(that is, leaves of the reachability tree) have empty queue
content:  . We
remark that systems that are not complete loose message: indeed,
at the end of the computation there are unconsumed messages in
queues. We will consider only complete CSTS in the following.
. We
remark that systems that are not complete loose message: indeed,
at the end of the computation there are unconsumed messages in
queues. We will consider only complete CSTS in the following.
We say that action is fireable in state  , if there is a transition
, if there is a transition
 . In this
case, we write
. In this
case, we write  . Let
. Let  be a (possibly infinite) sequence of states
and actions interleaved. We say that the sequence is fireable
from
be a (possibly infinite) sequence of states
and actions interleaved. We say that the sequence is fireable
from  , written
as
, written
as  , if
, if
 . The
behavior of the CSTS is a set of such sequences fireable
from the initial state:
. The
behavior of the CSTS is a set of such sequences fireable
from the initial state:
Since we assume finite-state BPEL processes, the control
states of a CSTS are also finite. The only possibility to have an
infinite reachability graph is when the messages contained in a
channel can grow unboundedly. We have already discussed in Sect.
2.4 that we consider systems with
channels that grow unboundedly as "bad" systems. Moreover,
finite-state verification is not applicable on these systems.
Therefore, one of the critical problems to be addressed during
the analysis is to identify and rule out these systems. In the
following, we say that the channel of a CSTS have a bounded
growth if, for every queue  , either a finite bound
, either a finite bound  is declared, or there is some
constant
is declared, or there is some
constant  such
that the queue contains at most messages in all reachable states.
such
that the queue contains at most messages in all reachable states.
We remark that the proposed CSTS-based model of Web service composition captures only the control flow of the participating processes. However, BPEL allows one to define also the data flow of the composition. In other words, it is possible to define the data values carried by the messages, conditions on the process transitions etc. This information has to be taken into account in the analysis of the BPEL composition. As we show later, this is addressed by enriching the composition with variables and other data-dependent constructs before passing it to the model checker, and performing the actual verification on the enriched models. The presence of data values in messages also influences the alphabet on which the queues are defined. Indeed, the management of queues could depend not only on the type of the messages, but also on the associated values. This may be resolved refining the model by introducing a new message type for each distinct set of data values or, for each set of data values that can be distinguished by the BPEL run time environment. If the data domains are finite, the approach we describe below works also in this refined setting. We intend to better investigate in future works the issues related to an adequate model of data domains in the definition of the queue structure.
The definition of CSTS is parametric w.r.t. a communication model. Different communication models (and hence queue structures) define different behaviors for the same composition scenario. Therefore, the result of the verification of a composite system depends on the selected communication model. In order to guarantee the correctness of the verification, we have to make it sure that the selected communication model allows for all the behaviors that are compatible with the assumptions presented in Sect. 2.4.
In this section we address the problem of defining suitable communication models for CSTS, and of guaranteeing that these communication models are adequate w.r.t. the real executions, i.e., that they do not discard any execution that can happen according to our assumptions.
This is achieved through the following steps:
One of the tasks in the adequacy analysis is to check whether the composition of Web services under the given communication model does not loose behaviors w.r.t. some other more general model. This requires introduction of certain relations between models, namely simulation relations.
We will write  to denote the composition of a given set of
STSs under communication model
to denote the composition of a given set of
STSs under communication model  .
.

When the simulation relation among two communication models
 and
and  holds for any set of
STSs, we say that the model is more general than the model
.
holds for any set of
STSs, we say that the model is more general than the model
.

Being reflexive and transitive, this relation forms a partial
order on the set of communication models. Below we will show that
there is a "most general" model, that is the model  , such that for any other model holds
, such that for any other model holds  .
.
The relation among communication models relies on the structure of the queues. There are two dimensions in which the models differ. First, the relation depends on the queue bounds: the bigger a queue bound is, the more transitions might be enabled. Second, it depends on the distribution of the message alphabets: if the alphabet of each queue in one model is a subset of the alphabet of some queue in another model, then the first model is more general then the other. The following theorem defines relation between models with different queue structures.
The theorem may be easily understood on the following example.
Consider a model with one queue  with alphabet
with alphabet  , and a model with two queues
, and a model with two queues  and
and  with alphabets
with alphabets  and
and  respectively. Indeed, if an input action
is allowed in the composition under model then it is also allowed in the
second model, since if a message is on the top of the queue in
first model and can hence be consumed, then it is on the top of
one of the queues in the second model. Similarly, if an output
action
respectively. Indeed, if an input action
is allowed in the composition under model then it is also allowed in the
second model, since if a message is on the top of the queue in
first model and can hence be consumed, then it is on the top of
one of the queues in the second model. Similarly, if an output
action  is
allowed in the first model, then the queue is not full, that is
is
allowed in the first model, then the queue is not full, that is
 . Since
. Since
 (the two
queues have the same length if contains only messages of type
(the two
queues have the same length if contains only messages of type  ) and, by
) and, by  , then
, then  and hence the output action
is not blocked
in the second model.
and hence the output action
is not blocked
in the second model.
The first step of the adequacy analysis is to define the reference model, that is, the model that allows for the largest set of behaviors. In order to respect the assumptions of Sect. 2.4, this model has to allow for potentially unbounded queues, non-blocking emissions, and arbitrary, unordered access to the content of any queue.
The definition of this model is based on the following observation. Two invocations of the same operation lead to a situation where the queue contains two messages of the same type. From the external point of view, the two messages are indistinguishable. The same holds for the possibility to consume them in any order: if two messages of the same type are contained in the queue, then the order in which they are consumed becomes irrelevant. Therefore, in order to model arbitrary access to any message in any queue, it is enough to model such a system with the separate queue for each message type.

It is easy to see that such a model is indeed a generalization of any other communication model w.r.t. the behavior of any composition of STSs.

Whenever a composition under a certain model simulates the most general composition, we
say that this model is adequate for the description of the
composition scenario.

An important result in the proposed framework is that the finiteness of the reachability graph under the MG-model is decidable. Indeed, the class of systems that can be modeled in this way forms a subclass of Petri-Nets, and ``boundedness'' is decidable for Petri-Nets [10].

Model defines the most
liberal policy for the message processing: each message stored
can be accessed and consumed regardless the reception order. On
the other hand, this model is also the least realistic, among the
ones described in this section, for what concerns the
implementation of a middleware generating all the behaviors
allowed by the model. Indeed, all existing engines apply a
specific policy for the queues and do not allow for such an
arbitrary consumption of messages as the one allowed in the
model.
We now define a hierarchy of communication models that are particularly significant for verifying Web service compositions and that have been proposed in the literature.

This model is strongly related to another communication model
widely used for modeling Web service compositions, namely
synchronous composition. In such a model, communicating
processes synchronize on shared actions; therefore this model can
be represented without queues. More precisely, when the  model is shown to be
adequate for a given composition scenario, one can use a
synchronous composition for the analysis of wide range of
properties, thus achieving better performance. In the following,
we formalize this result. We start with a definition of a
synchronous composition.
model is shown to be
adequate for a given composition scenario, one can use a
synchronous composition for the analysis of wide range of
properties, thus achieving better performance. In the following,
we formalize this result. We start with a definition of a
synchronous composition.
Let us define a conversation of the composition as a
sequence of messages emitted during interactions [7]. That is,  , with , is a conversation if there is a behavior
, with , is a conversation if there is a behavior
 , and for each
, and for each
 there exists
there exists
 s.t.
s.t.
 and
and  . We denote a
conversation set of the composition as
. We denote a
conversation set of the composition as  .
.
When the verification properties are defined on the set of
conversations, and the composition appears to be complete under
model, then
one can use the synchronous product for the composition
analysis.

Due to the strong hypotheses on the synchronizable communication model, the kinds of systems for which the model is adequate are also subject to restrictive hypotheses on the kinds of interactions that can occur. As a consequence, the compositions, for which this model was proved to be adequate, are very robust and exhibit the same behavior on all the implementations of BPEL engines. For this reason, the synchronizable model is the less demanding on the underlying middleware among the ones studied in this paper.

This model is more general than the synchronizable
model:

Indeed, this model is required for describing the composition scenario in Sect. 2.2.
This communication model requires that messages are queued on a process-by-process way. This policy for managing queues is a reasonable and easy to implement, and it provides a good compromise between the complexity of the implementation and the class of examples it is able to cover. Similar considerations also hold for the next model we present.
In this model, a pair of queues is defined for each pair of processes, with each queue representing one direction of interaction between these processes. This model, described in [3], provides a natural representation of communicating BPEL processes since each process explicitly distinguishes each of its partners.
The main feature of this model is that each pair of communicating processes preserves the order of partners' events. In other words, the order of receptions is equivalent for each pair of processes.

This model is clearly more general than the synchronous model. It is also more general with respect to locally ordered asynchronous model. To see this, notice that the input messages of the particular process are stored potentially in several queues instead of only one. Therefore, the alphabet of these queue is smaller, and more actions are fireable (Theorem 1). This model is required for the composition scenario described in Sect. 2.3.
We conclude this section with the overall hierarchy of the
models defined:
We remark that the CSTS formalism allows for potentially infinite number of models to be defined. The MG-model is the upper bound of this construction and we use this fact in the adequacy analysis presented below.
We now present an approach for the analysis of compositions of Web services. In this approach, we incrementally pass through the models starting from the synchronizable until the least general adequate model is found for the given composition scenario. As we will see in the Sect. 6, this allows not only to find a proper model of communication for the scenario but also to perform the analysis more efficiently. Indeed, if the model is shown to be adequate for the given composition, and the composition behaves correctly, then it will be correct also under more general models.
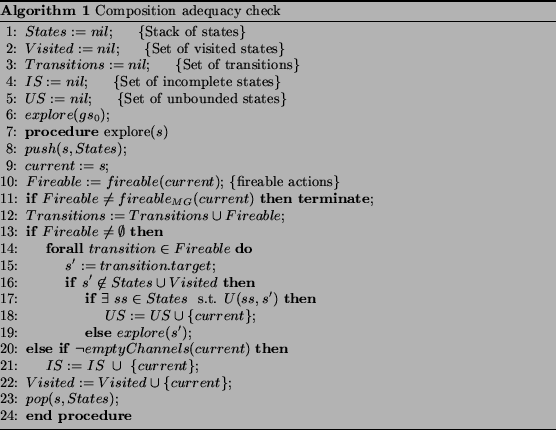
The number of models that we could consider in our approach is potentially infinite. Here, we assume to have fixed a finite set of models that we consider interesting for the analysis (this could be for instance the sequence of models we have introduced in the previous section). We assume moreover that the simulation relation defines a total order on these models, and that the MG-model belongs to the set (and is hence its upper bound). More precisely, the algorithm of the approach is as follows:
 such that
such that  ;
; ;
;When an adequate communication model is identified, and the composition is shown to have queues with a bounded growth, the obtained reachability graph may be used as a basis for further verification tasks. Indeed, the graph is finite, and actual queue bounds may be extracted by analyzing reachable states thus allowing for finite representation of the composition model in the model checker specifications.
As we mentioned above, the results of the verification may be affected by the data flow specified in the BPEL code. For this reason the composition obtained after steps specified above is equipped with data-related constructs, and the resulting model is analyzed using model checking techniques.
The algorithm is used to give an answer for the following questions: (i) the model under consideration is adequate for the description of the given composition; (ii) the composition is complete and has queues with a bounded growth.
The algorithm is presented in Alg. 1. The outcome of the algorithm is the constructed reachability graph representing the composition, if the model is adequate, or the witness of the fact that the model is not adequate. Whenever the state with non-empty queue content is found s.t. it can be never completed, it is added to the special container incomplete.
In order to terminate the search when the composition has
unbounded growth, we use the following relation  :
:

Here we write  if for any queue index
if for any queue index  there is a suffix
there is a suffix  such that
such that  . Thus two states are in the
relation iff the control state is the same and the queue content
increased. We write
. Thus two states are in the
relation iff the control state is the same and the queue content
increased. We write  to denote that
to denote that  and
and  .
.

The behavior of the algorithm is the following.
 of each
action (14-19).
of each
action (14-19).When the reachability graph that represents the behavior of the composition is constructed, we enrich it with the data-related part from the component processes. BPEL allows for the description of the data flow in the processes by defining variables of arbitrary types and operations on them. In particular, one can assign a certain value to the variable, use it as a parameter for the remote operation invocation, or use its value in the conditions in if-then-else constructs or loops. As a result, in the model with data the executability of certain transitions depends on the values of these variables, and the behavior of the composition may change affecting the analysis results.
For this reason actual verification is performed on the models equipped with data using model checking techniques. In order to be able to apply them, such an extended model has to be finite, and therefore the domains of the variables should also be finite. Detailed description of the data-related constructs translation and manipulation may be found at http:/www.astroproject.org/.
A prototype of a verification tool based on the parametric communication model presented in this paper has been implemented within the Astro toolkit and is available as part of the project (http:/www.astroproject.org/).
We conducted series of experiments in order to evaluate the presented approach. The aim of the evaluation was to demonstrate that the less general model shown to be adequate is more efficient for the analysis, and to see the overall performance of the composition verification based on the presented approach.
In particular, we were interested in the performance and in the memory usage of the composition analysis. In these experiments we used variations of the VTA example, where the number of the participating processes grows from two up to seven processes. We remark that the VTA process also grows since it interacts with increasing number of services. The ranges of the domain types used in the messages (e.g. Flight, Time) were set to three values for each type. Although the examples described in the paper are relatively simple, they still are considerably more complex with respect to the samples presented in other tools (e.g., [7,6]).
In order to compare the verification complexity on the same scenarios under different communication models, we have used domains where the synchronous model is adequate. We used two properties in the experiments specified as Linear-time Temporal Logic (LTL) formula. The first property (P1) requires that the user process terminates successfully only if also the reservation services do. This property is expected to be valid in the domain, i.e., to be respected by all the executions of the Web service composition. The second property (P2) expresses the possibility for the partners to terminate successfully. This property is expected to be satisfiable, i.e., there are some executions of the composition where the property is true. Moreover, we expect that the verification task produces a trace corresponding to one these executions, thus witnessing the validity of this possibility.
The results of the verification of these properties are summarized in Table 1. The verification was performed using two state of the art model checkers, namely NUSMV [4] and SPIN [9]. We tested the specifications of the composition under synchronous product (Sync), under locally order model (LO) and under the most general model (UO). The table contains information on the time used for the verification and counterexample generation in seconds, and on the size of the state vector in bytes. That is, if the state vector size is 14 bytes, the state space is 28x14 states.
Table 1: Verification results
| Property | N | NuSMV | SPIN | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sync | LO | UO | Sync | LO | UO | ||||||||
| Time | Size | Time | Size | Time | Size | Time | Size | Time | Size | Time | Size | ||
| P1 | 2 | 0.08 | 5 | 0.09 | 6 | 0.09 | 6 | 0.87 | 48 | 0.89 | 56 | 0.89 | 76 |
| 3 | 0.11 | 8 | 0.13 | 9 | 0.15 | 10 | 1.05 | 60 | 1.09 | 76 | 1.13 | 120 | |
| 4 | 0.19 | 11 | 0.22 | 13 | 0.24 | 15 | 1.51 | 72 | 1.60 | 100 | 1.75 | 172 | |
| 5 | 0.26 | 14 | 0.32 | 17 | 0.36 | 20 | 3.67 | 84 | 4.79 | 120 | 6.37 | 220 | |
| 6 | 0.32 | 17 | 0.42 | 21 | 0.50 | 24 | 90 | 100 | > 1Gb | > 1Gb | |||
| 7 | 0.44 | 20 | 0.64 | 24 | 3.75 | 27 | > 1Gb | > 1Gb | > 1Gb | ||||
| P2 | 2 | 0.01 | 5 | 0.02 | 6 | 0.02 | 6 | 0.87 | 48 | 0.89 | 56 | 0.92 | 76 |
| 3 | 0.33 | 8 | 0.48 | 9 | 0.52 | 10 | 1.05 | 60 | 1.09 | 76 | 1.13 | 120 | |
| 4 | 1.14 | 11 | 2.28 | 13 | 8.35 | 15 | 1.38 | 72 | 1.46 | 100 | 1.52 | 172 | |
| 5 | 20.1 | 14 | 36.8 | 17 | 69.0 | 20 | 1.85 | 84 | 1.85 | 120 | 1.95 | 220 | |
| 6 | 114 | 17 | 221 | 21 | 469 | 24 | 2.31 | 100 | 2.33 | 140 | 2.46 | 272 | |
| 7 | 771 | 20 | 1279 | 24 | > 1 hour | 2.89 | 112 | 2.98 | 160 | 3.27 | 320 | ||
Some comments on the difference in the performance of NUSMV between the two properties. This is due to the fact that the second property requires the generation of a witness scenario, and this takes a lot of time. The time required by NUSMV to report that the second property can be satisfied without extracting the witness trace is similar to the time required to verify the first property. On the contrary, the verification using SPIN model checker requires much more time for the first property. Indeed, in this case all the behaviors have to be considered to prove the correctness of the property, while a single witness trace is sufficient for the second property.
The presented results demonstrate the reduction of the verification performance when more general communication model is applied. This is explained by the fact that more general model introduces more queue variables and therefore increases the state space size. This is particularly important for the NuSMV model checker, since the techniques used there strictly depend on the number of variables, their domains and relations.
In this paper we presented a unified framework for the analysis and verification of Web service compositions provided as BPEL specifications. The framework is based on a definition of composition of BPEL processes that is parametric with respect to the communication model. The class of compositions that we are able to model and analyze is substantially larger than those covered by other verification approaches. We also provide an algorithm that is able to identify the simplest communication model that is adequate for the composition, and to build the corresponding composition. Our experiments show that choosing the right model can lead to a substantial improvement in the verification performance.
In our earlier work [11], we made an initial attempt to design a framework suitable for representing different communication mechanism. The framework was based on a specific form of composition, referred as extended parallel product, and was not able to handle different models in a uniform way and to define relations between them. As a result, that approach lacks the completeness and expressiveness of the formalism presented in this paper. Also the experimental evaluation in [11] is more limited and only considers the NUSMV model checker.
In [7] an approach for the analysis of interacting BPEL processes is presented. The approach allows performing a synchronizability analysis of the composition, that is to verify that the synchronous composition may be applied for further analysis without loosing behaviors. However, this approach fails to determine an appropriate model if the composition does not pass that check. On the contrary, our framework extends this approach by providing a complete way to determine such a model and allows for defining of wider class of verification properties.
In [6], process algebras are exploited to verify BPEL processes. More precisely, that approach allows for the analysis of basic properties of BPEL specifications, such as safety and progress checks. The approach is based on the synchronous communications model and therefore is very restrictive with respect to the set of systems it is able to analyze correctly.
In general, the problem of analysis of communication systems with (potentially infinite) channels is widely studied in literature. In spite of certain undecidability results [3], there are a lot of works on restricted subclasses of such systems for which some problems were shown to be decidable (see, e.g., [1]), ranging from synchronous composition to Petri Net-based approaches [16]. While these approaches are devoted to the analysis of a specific communication model in a general setting, our goal is to provide a set of models that allow for a parametric verification in the specific case of Web service compositions.
[1] P. A. Abdulla and B. Jonsson. Channel representations in protocol verification. In CONCUR, pages 1-15, 2001.
[2] T. Andrews, F. Curbera, H. Dolakia, J. Goland, J. Klein, F. Leymann, K. Liu, D. Roller, D. Smith, S. Thatte, I. Trickovic, and S. Weeravarana. Business Process Execution Language for Web Services (version 1.1), 2003.
[3] D. Brand and P. Zafiropulo. On communicating finite-state machines. J. ACM, 30(2):323-342, 1983.
[4] A. Cimatti, E. M. Clarke, E. Giunchiglia, F. Giunchiglia, M. Pistore, M. Roveri, R. Sebastiani, A. Tacchella. NuSMV 2: An OpenSource tool for symbolic model checking. In Proc. CAV'02, 2002.
[5] E. A. Emerson. Temporal and modal logic. In J. van Leeuwen, editor, Handbook of Theoretical Computer Science, Volume B: Formal Models and Semantics. Elsevier, 1990.
[6] H. Foster, S. Uchitel, J. Magee, and J. Kramer. Model-based verification of Web Service Compositions. In Proc. ASE'03, 2003.
[7] X. Fu, T. Bultan, and J. Su. Analysis of Interacting BPEL Web Services. In Proc. WWW'04, 2004.
[8] S. Graham, S. Simenov, T. Boubez, G. Daniels, D. Davis, Y. Nakamura, and R. Neyama. Building Web Services with Java: Making Sense of XML, SOAP, WSDL and UDDI. Sams, 2001.
[9] G. J. Holzmann. The model checker SPIN. Software Engineering, 23(5):279-295, 1997.
[10] R. M. Karp and R. E. Miller. Parallel program schemata. J. Comput. Syst. Sci., 3(2):147-195, 1969.
[11] R. Kazhamiakin and M. Pistore. A Parametric Communication Model for the Verification of BPEL4WS Compositions. In Proc. WS-FM'05, 2005.
[12] R. Khalaf, N. Mukhi, and S. Weeravarana. Service Oriented Composition in BPEL4WS. In Proc. WWW2004, 2004.
[13] J. Koehler and B. Srivastava. Web service composition: Current solutions and open problems. In Proc. of ICAPS'03 Workshop on Planning for Web Services, 2002.
[14] S. Nakajima. Model-checking verification for reliable web service. In Proc. OOPSLA'02 Workshop on OOWS, 2002.
[15] S. Narayanan and S. McIlraith. Simulation, Verification and Automated Composition of Web Services. In Proc. WWW2002, 2002.
[16] J. L. Peterson. Petri Net Theory and the Modeling of Systems. Prentice Hall PTR, Upper Saddle River, NJ, USA, 1981.
[17] M. Pistore, M. Roveri, and P. Busetta. Requirements-Driven Verification of Web Services. In Proc. WS-FM'04, 2004.